- amplitude - pulsation - phase shift - frequency - period
Important
AC circuit has solutions where alternating signals have the same pulsation
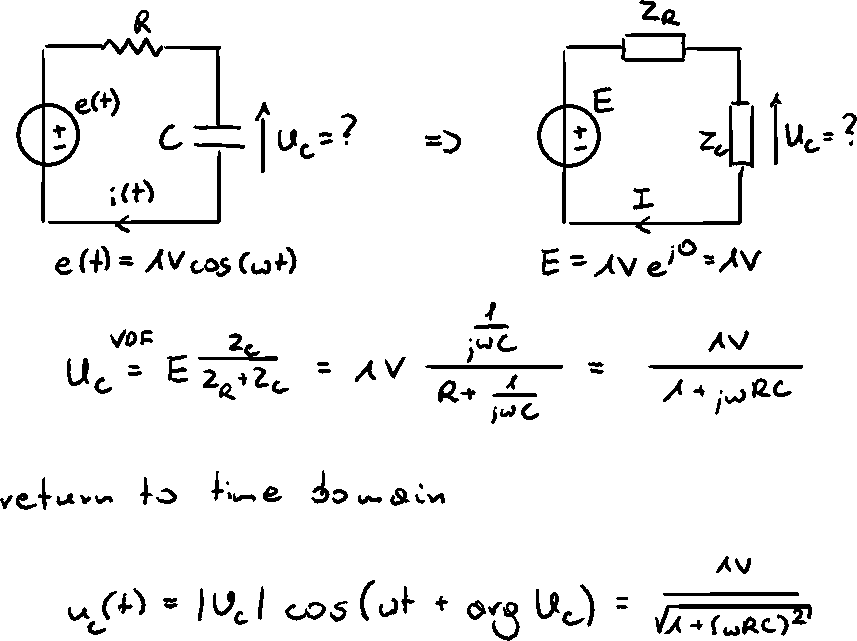
Example
AC signal notation
Phasors
Alternating signal
has a phasor
Components
Voltage source
Current source
Resistor
Inductors
Capacitors
Devices described in time domain by linear differential equations (inductors, capacitors, ...) are governed by linear algebraic equations in the phasor domain